2.2.5 High Tech im Operationssaal –
Minimale Invasive Computergestützte Implantation einer Hüftendoprothese "MIS HTP" mit dem Stryker-Leibinger System
Auf den Punkt der richtigen Prothesenlage wollen wir ein wenig genauer zu sprechen kommen, denn auch bei der Hüftendoprothetik helfen in der heutigen Zeit Computersysteme dem Operateur bei der Implantation der Prothese.
Es ist leicht vorstellbar, dass beim Ersatz eines Gelenkes des menschlichen Körpers das neue Gelenk als Teil eines komplexen Systems von Knochen, Bändern und Muskeln äusserst exakt positioniert werden muss, um Komplikationen wie Luxationen, eingeschränkte Beweglichkeit, Schmerzen und vorzeitige Abnützung zu vermeiden.
Bisher ist der Operateur auf seine Erfahrung und einige wenige Orientierungshilfen angewiesen. Mit Hilfe der immer ausgereifterer Navigationssysteme der Firma Stryker-Leibinger können die Hüftprothesenkomponenten in Zukunft ähnlich wie bei der Knienavigation sehr exakt positioniert werden. Anhand von anatomischen Landmarken wird intraoperativ dem Computersystem ein Bild des Hüftgelenkes mit dem Bein des Patienten ermittelt.
Einige Instrumente für die computer-navigierte Implantation einer minimal invasiven Hüftendoprothese mit dem Stryker-Leibinger System

Das Navigationsgerät der Firma Stryker –Leibinger mit einer Kamera und einem Infrarot-Empfänger. Das Gerät wandelt alle Daten mit speziellen Algorithmen um und stellt sie auf dem Bildschirm für den Operateur dar.
 A
A
 B
B
 C
C
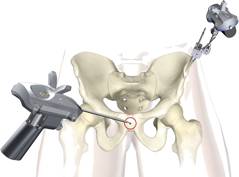
Der "pointer": Mit diesem Gerät steuert der Operateur das Navigationsgerät vom Operationstisch aus (Bild A) und der Operateur kann die einzelne Anatomische Punkte digitalisierten (Bild B und C).

Die "trackers": Sie kommunizieren mit der Infrarotkamera des Navigationssystems und sie melden die Position des Beckens (blau) und des Beines (grün) im Raum.

Die Fixation des Trackers am Becken mit einem Ortholock. Dies bestimmt die Position des Beckens im Raum.

Die Fixation eines Trackers am Becken (blau) und eines Trackers am Bein (grün) an einem Modell. Beide Trackers bestimmen die Position des Beckens und des Beines im Raum.
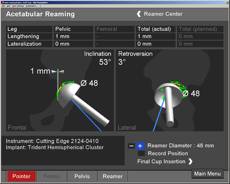
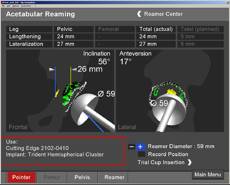
Anhand dieser Daten werden die Belastungsachsen und die optimale Position der Prothese in allen drei Ebenen errechnet und der Operateur erhält diese Daten angezeigt (Abbildung 10).
 A
A
 B
B
(Abbildung 10) Der Chirurg kann die Position der Pfanne in die gewünschte Anteversion und Inklination anhand der Daten auf dem Computer auffräsen (Foto A) und anschliessend definitiv einbauen (Foto B).
Mit Hilfe dieser Berechnungen kann der Operateur die Prothese exakt positionieren. Wichtig ist hierbei, dass die Erfahrung des Operateurs unabdingbar ist, denn das Navigationssystem stellt nur ein Messinstrument/Hilfsmittel für den Operateur dar, um sich im dreidimensionalen Raum besser zu orientieren, die Operation wird nach wie vor vom Orthopäden durchgeführt. Ein weiterer Vorteil ist, dass mit Hilfe der Orientierungshilfe durch das Navigationssystem der Operateur die Weichteile wie Muskeln und Sehnen schonen kann, da er intraoperativ weniger Strukturen „freilegen“ muss, um sich zu orientieren. Dies stellt in Hinblick auf die sogenannte minimal invasive Endoprothetik einen wichtigen Gesichtpunkt dar.
Zusammenfassend stellt die computergestützte Navigation also ein effizientes und kostengünstiges Mittel dar um die Prothese in optimaler Position zu implantieren. Durch einen exakten Sitz der Prothese werden Schmerzen vermieden, die Prothesenstandzeiten verlängert und nicht zuletzt kommt es aus diesen Gründen langfristig zu beträchtlichen finanziellen Einsparungen im Gesundheitssystem.
Über allem gilt jedoch, dass ein computergestütztes Navigationssystem zwar eine grosse Hilfe darstellt, einen erfahrenen Operateur jedoch nie ersetzen wird.
Dank der Unterstützung der Navigation ist es dem erfahrenen Operateur aber möglich, auch durch diesen kleinen Zugang eine präzise Einstellung der Position Pfanne und des Schaftes und somit auch eine bessere Stabilität der Prothese zu erreichen.
Diese neue Operationsmethode braucht keine zusätzlichen radiologischen oder computer-tomographischen Vorabklärungen und kann nach einer gewissen Erfahrung auch die Operationsdauer reduzieren.
Die Rehabilitation sowie die Hospitalisationsdauer des Patienten werden kürzer, die Lebensdauer der Prothese wird länger Das ist aber nur möglich wenn die Prothese anatomisch perfekt eingebaut wird. Minimale Veränderungen davon können chronische Schmerzen, eine Hüft Luxation und eine frühe Lockerung der Prothese verursachen, was wiederum einen frühzeitigen Prothesenwechsel mit hohen Folgekosten notwendig macht.
Unter diesen Aspekten wird die Computernavigation in Zukunft eine Reduktion der Kosten für das Gesundheitswesen hervorrufen, die computer-assistierte Navigation wird aber nie die Erfahrung des Chirurgen ersetzten können.
