2.2.3.4 Impianto di una protesi del ginocchio con il sistema di navigazione Stryker
Nelle seguenti immagini si dimostra come avviene l’impianto di una protesi al ginocchio con il sistema di navigazione computer-assistita della ditta Stryker-Leibinger per una gonartrosi vara (vedi esempio nella figura 1 ed il risultato finale nella figura 3).
Immagine 0:
Fase Pre-operatoria
Il paziente riceve un’anestesia totale o spinale, a secondo dei suoi desideri. Il paziente viene messo sul tavolo operatorio in modo supino e la gamba viene disinfettata in modo asettico (Foto A). La foto B mostra in modo schematico la posizione del paziente e del computer: il paziente sul letto e il navigatore ad una distanza di 1.5 m che capta con i raggi infrarossi la posizione delle gambe trasmessi dai trasmettitori (inglese „trackers“).
 A
A 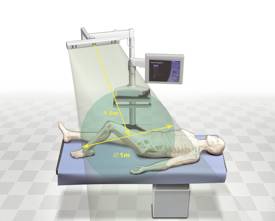 B
B
Immagine 1:
Posizionamento del lettore di navigazione
Dopo un’artrotomia mediale a cielo aperto con un taglio di 15-18 cm (Foto A) o dopo un’artrotomia con chirurgia minimale invasiva con un taglio da 8-12 cm (Foto B) questi lettori sono fissati al femore e alla gamba e consentono, grazie al sistema di navigazione, un’esatta rilevazione dei dati fondamentali durante l’operazione.
 A
A
 B
B
Immagine 2:
Il lettore con il trasmettitore
I due lettori con il trasmettitore sono fissati al femore e alla tibia e trasmettono alla stazione di navigazione (Foto A). Come già citato, questi trasmettitori servono per comunicare con la telecamera a raggi infrarossi del sistema di navigazione. Scema della posizione dei lettori con il trasmettitore (Foto B).
 A
A 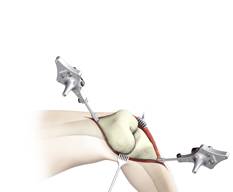 B
B
Immagine 3:
L’articolazione del ginocchio viene digitalizzata
Con l’aiuto del puntatore (dito palpatore, inglese „pointer“) vengono digitalizzati i punti anatomici chiave dell’articolazione del ginocchio (Foto A). In questo modo il sistema di navigazione fornisce tutti i dati fondamentali in tempo reale in sala operatoria, cosicché non è più necessario svolgere ulteriori ricerche dispendiose, come la tomografia computerizzata. Tecnica a cielo aperto (B) e tecnica con chirurgia minimale invasiva MIS (C).
 A
A
 B
B  C
C
Immagine 4:
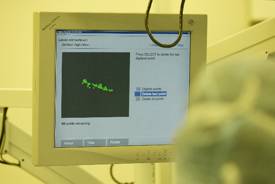
Esempio di digitalizzazzione
Il sistema di navigazione mostra con precisione i punti anatomici chiave registrati. Qui una sezione della gamba con la digitalizzazione del piatto tibiale (A e B) e con la rispettiva visione nel computer (C).
 A
A
 B
B
 C
C
Immagine 5:
Assi e cinematica
Muovendo l’articolazione del ginocchio si possono controllare le parti del tessuto molle prima dell’impianto della protesi. Il chirurgo può riconoscere attraverso il monitor della stazione di navigazione le proporzioni assiali dell’arto (A) e la cinematica dell’articolazione durante tutto il movimento (B).
 A
A
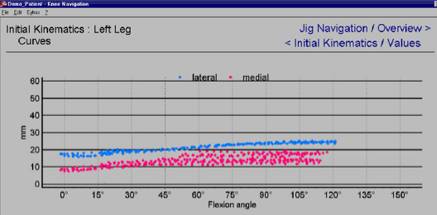 B
B
Tecnica con chirurgia minimale invasiva MIS (A-D).
 A
A
 B
B
 C
C
 D
D
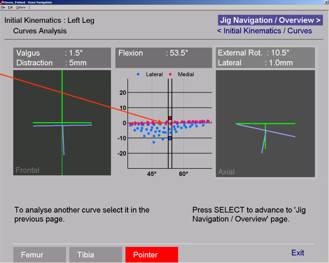
Immagine 6:
Assi e cinematica sul monitore
Quest’immagine mostra il punto di riferimento del chirurgo sul monitor dalla stazione di navigazione per l’individuazione delle assi dell’arto (A). Nella foto B si vede l’immagine del computer con la visione dell’asse varo/valgo (immagine a sinistra), dell’asse di flessione/estensione (immagine in mezzo) e con l’asse di rotazione esterna/interna (immagine a destra)
 A
A 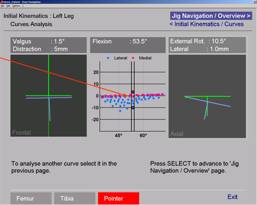 B
B
Immagine 7:
Femore, lettore e maschera di taglio fissa e mobile
Questa immagine mostra il femore con il lettore del sistema di navigazione e la maschera di taglio. Tecnica a cielo aperto con maschera da taglio fissa “Dedicated jig” (A e B).
 A
A 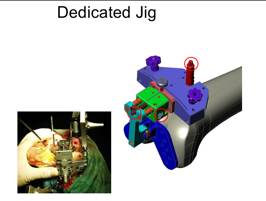 B
B
Tecnica con chirurgia minimale invasiva MIS con maschera di taglio mobile (A e B).
 A
A
 B
B
Tecnica a mani libere per porre la maschera di taglio guardando direttamente il video del computer a secondo il desiderio del chirurgo e fissazione con dei chiodi della maschera di taglio nella posizione desiderata (B).
Immagine 8:
Impostazione della rotazione della componente femorale
Tecnica a mani libere per impostare la rotazione della maschera di taglio per la tecnica con chirurgia minimale invasiva MIS (A).
 A
A
Immagine del computer con la visione della posizione della maschera di taglio (B).
 B
B
Immagine 9:
Precisione
Con l’aiuto del sistema di navigazione Stryker-Leibinger si può regolare il taglio del femore con una precisione di 0.3 millimetri e di 0.3 gradi.

Immagine 10:
Taglio dell’osso del femore
Il chirurgo taglia l’osso del femore per porre successivamente, in maniera ottimale, la protesi. Tecnica a cielo aperto (A) e tecnica con chirurgia minimale invasiva MIS (B).
 A
A  B
B
Immagine 11:
Taglio del piatto tibiale e controllo della posizione della rotazione della componente tibiale
 A
A
Tecnica a mani libere per porre la maschera di taglio del piatto tibiale guardando direttamente il video del computer a secondo il desiderio del chirurgo e quindi fissazione con dei chiodi della maschera di taglio nella posizione desiderata (A).

La posizione della componente tibiale viene controllata nella posizione di rotazione con l’aiuto del sistema di navigazione.
Immagine 12:
Allineamento del taglio della gamba
Allineamento esatto del piano di sezione della gamba con l’aiuto del sistema di navigazione, visto dall’angolazione del chirurgo. Questo sistema di navigazione permette un ripristino perfetto dell’asse meccanico dell’arto, della rotazione della protesi e dell’equilibrio dell’apparato legamentoso durante tutto il movimento del ginocchio.

Immagine 13:
Impianto della protesi di prova
Dopo che il femore e la tibia sono stati preparati per l’impianto, il chirurgo inserisce prima di tutto una protesi di prova. Tecnica a cielo aperto (A) e tecnica con chirurgia minimale invasiva MIS (B).
 A
A
 B
B
Solo dopo che il chirurgo è soddisfatto al 100% del risultato, viene impiantata la protesi definitiva.
Immagine 14:
Fine dell’operazione
Dopo ca. 1 h e 45 min. l’operazione è terminata e la cute viene suturata. Il risultato finale è visibile radiologicamente nella figura 3.
Chiusura della pella con la tecnica a cielo aperto (A) e risultato finale dopo avere chiuso la pelle per la tecnica con chirurgia minimale invasiva MIS (B).
 A
A
 B
B
Immagine 15:
Paziente dopo 2 settimane
Risultato finale dopo intervento d’impianto di una protesi al ginocchio con tecnica con chirurgia minimale invasiva MIS a destra (A) e posizione di carico su due gambe (B).
 A
A  B
B
Immagine 16:
Radiografie prima e dopo l’operazione
Radiogramma in piedi: Un paziente con un’artrosi vara al ginocchio sinistro di 2 gradi prima dell’operazione (foto A) e dopo l’impianto di una protesi (NRG System der Firma Stryker) al ginocchio sinistro con la tecnica minimale invasiva e con la navigazione computerizzata ricreando un’asse della gamba sinistra diritto (foto B).
 A
A 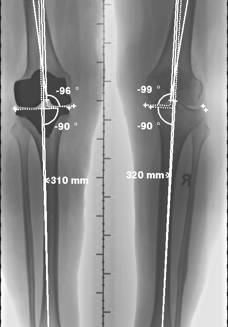 B
B
Gonartrose:
Per tornare all'indice: Per favore puntare il pulsante qui
